Drone-on-rail surveillance station

The aim is to build a top-view surveillance station by a charging base and a drone-on-rail.
At the beginning, the drone is in the “rest” state, laying on the base, recharging itself. Eventually, the drone can start flying up to the top of the vertical rail. Once at the top, an electromagnet hooks the drone and the propellers can stop rotating. The drone, now at the “monitor” state, is equipped with 3 cameras, a fishino board to stream the 360° video over wifi and few sensors:
- * light sensor to detect when to go to sleep (down to the rail to the charging base, back to the rest state);
- * rain sensor to detect when to go to the rest state and close the base cap;
- * bonus: it can also detect when the batteries are not able to keep the cameras turned on, so (like the other two sensors do) it sends a signal to the base to release the electromagnet and starts flying down to the charging base.
Last but not least, in case of missing power supply on the electromagnet, it uses the propellers to keep the position and eventually flies down if the lack lasts for a long time.
[ More: depending on the budget, it can also be developed totally water-proof, thanks to the wifi charging module. This semplifies/removes the need of a cap for the rain ]
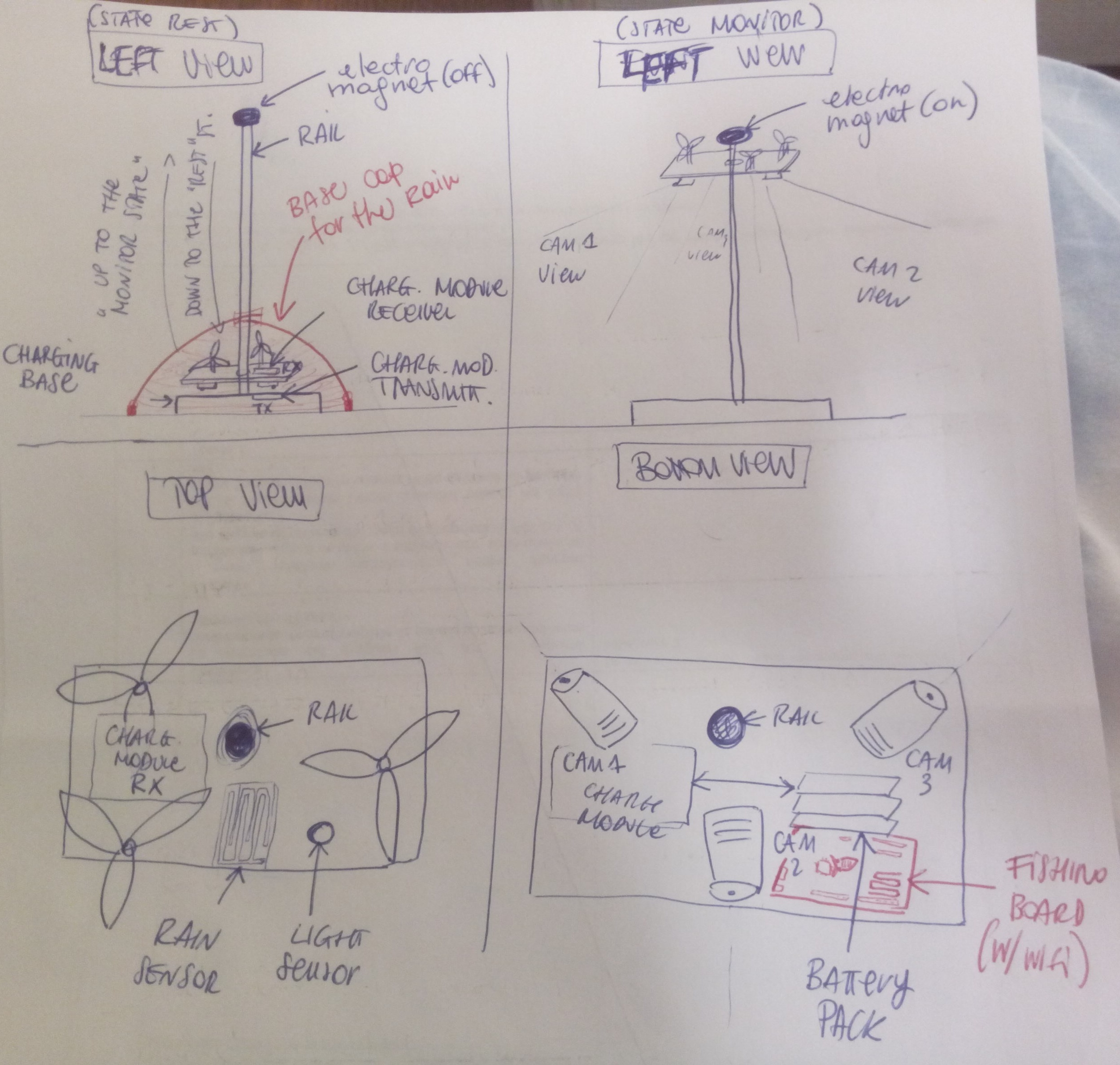
Functional draft:
Part list:
- Wireless Power Kit TX/RX
- Fishino / Arduino + WiFi mod.
- 3 cameras
- 3 propellers
- 1 light sensor (ex. KY-018)
- 1 rain sensor
- 1 magnetic reed (ex. KY-021)
- 2/4 limit switch and two stepper motors for the plexiglass cap
Mirco Babini