Autotron PI
0
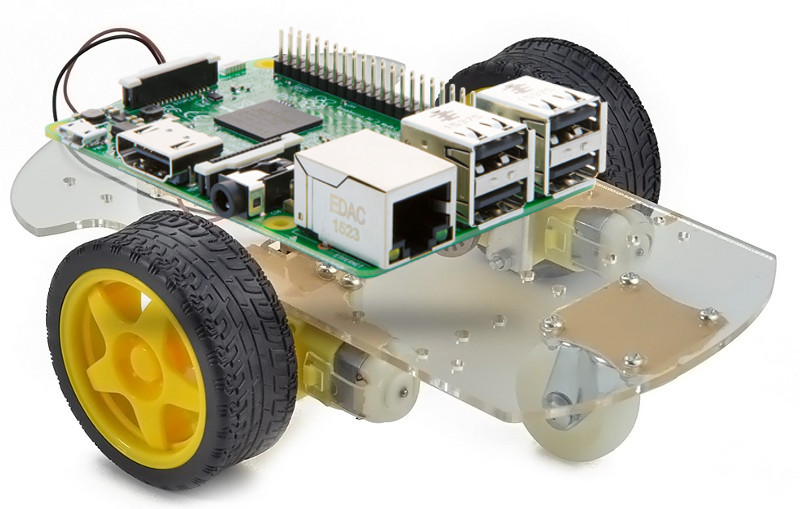
We are going to build an internet-enabled robocar:
- Brains: Raspberry Pi 3
- Vision: RPI camera, streaming to net
- Muscle: L298 dual H-Bridge driver
- Fuel: 10 Ah Power bank
- Network: WiFi
- Controls: Web app
So that’s a car controlled over the internet, streaming it’s camera output to the same web page used to drive it.
Ideally, all the software would be run on the car itself. (end-user needs to implement NAT rules to make it really public)
RPI is certanly powerful enough, but it also consumes a lot of power.
Eventually, we are going to charge it wirelessly: after a ride, robocar goes to it’s parking place, to rest and recharge.
In first iteration, driver has to drive the car home manually.
As we progress, we add more sensors, car picks up more data, and eventually goes home by itself.
0